 无人驾驶汽车动态避障路径规划与跟踪控制虚拟仿真实验项目
无人驾驶汽车动态避障路径规划与跟踪控制虚拟仿真实验项目
点击“启动实验”进行实验操作,点击“实验数据”可查看、下载实验结果,对实验结果进行分析可在线填充实验报告,完成后需要点击实验台下方“提交”按钮将数据上传。
实验目的:
(1)掌握无人驾驶系统架构与组成;
(2)通过直观的汽车运动学原理,掌握汽车阿克曼转向原理及其推导关系;
(3)掌握基于二自由度汽车运动模型的无人驾驶路径跟踪控制Pure Pursuit(纯跟踪)算法和Stanley算法;
(4)掌握基于多项式表达的无人驾驶动态避障路径规划算法及应用;
(5)理解车辆沿参考线横纵向解耦的方法以及损失函数构造方法;
(6)掌握分析动态避障路径规划和路径跟踪控制算法及参数的关系和最优思想的应用;
(7)根据多次实验参数设置和实验结果独立分析实验参数的作用和参数匹配调试流程,加强对模型的理解与掌握程度。
(8)通过虚拟仿真实验提高学生动手实践能力,弥补实践能力的不足。
实验要求:
本虚拟仿真实验基于无人驾驶局部路径规划和路径跟踪控制真实算法的虚拟化实现,应用高仿真度动力学模型,构建算法应用和分析的虚拟仿真环境。在培养学生系统的综合分析能力、算法实现能力和解决复杂问题的能力方面应达到如下要求:
1、知识层面
拓展课堂知识点,引导学生进行沉浸式学习。通过虚拟仿真教学设计,掌握动态避障规划算法和路径跟踪控制算法,主要包括:
• 掌握无人驾驶系统架构与组成;
• 掌握阿克曼转向原理及其推导关系;
• 熟练掌握二自由度汽车运动模型下的Stanley算法和跟踪控制Pure Pursuit(纯跟踪)算法;
• 掌握路径跟踪控制器模型及参数的意义;
• 掌握基于多项式表达的轨迹生成方法和损失函数构造。
2、能力层面
以综合分析能力培养为目标,引导学生挑战算法的原理及数据综合分析,主要包括:
• 掌握分析动态避障路径规划和路径跟踪控制算法及参数的关系和最优思想的应用;
• 理解多项式轨迹数学模型和车辆沿参考线横纵向解耦的方法;
• 掌握对虚拟仿真实验数据进行可视化分析程序设计和结果对比分析。
3、团队合作能力
本实验以不断试错(优化)的方式进行循环重复进行多轮实验,,鼓励在进行虚拟仿真实验时,以小组形式进行综合分析和探索,以培养学生团队协作能力。
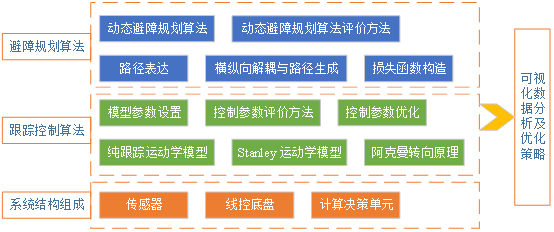
实验知识结构:
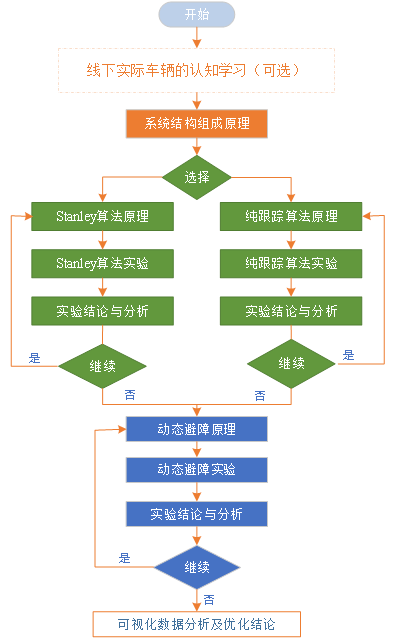
实验操作流程设计:
 返回首页
返回首页  答疑讨论
答疑讨论